Modbus-RTU
Introduction
Modbus 是常用的工業總線協議,屬於 Application Layer,工業上常用 Modbus-RTU 搭配 RS-485 或者 Modbus-TCP 搭配 Ethernet 來傳輸,也可以使用 UART 或 RS-232 甚至 RF 等無線媒介傳遞 Modbus 協議,並沒有規定一定要搭配哪種實體層。本文著重介紹 Modbus-RTU 搭配 RS-485 的通訊架構。
Modbus 幾種類型與傳輸媒介搭配:
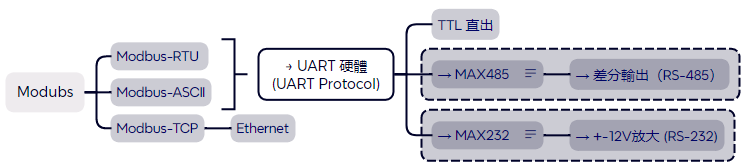
幾種 Modbus 形式: Modbus-RTU、Modbus-ASCII、Modbus-TCP
Modus-ASCII
早期這個協議用比較多,但被傳輸更有效率的 Modbus-RTU 取代,請參考與 Modbus-RTU 之比較。
Modus-RTU
Modbus-RTU (Remote Terminal Unit) 的命名強調了它的應用場景是為遠程設備之間的高效通訊而設計。
Modbus-RTU 協議規定採用 Master / Slave 架構,一律由 Master 發起通訊,相應的 Slave 進行回應。 因為 Modbus 為 Application 協議,並無規範用什麼媒介傳遞
- 故可以選擇 UART TTL 直接傳輸,或者加上 MAX232 晶片,採用 RS-232 傳輸標準。這兩者都是 point-to-point 拓樸,即 1 個 Master 對 1 個 Slave 點到點傳輸。
- 不過工業界用最多的還是 UART 加上 MAX485 晶片的 RS-485 標準,比起 RS-232 有眾多優勢,並且他是 Bus topology,多裝置得以連接在同一 fieldbus 上,即 1 個 Master 對多個 Slaves,非常適合工業自動化多設備連接。
Modbus-TCP
核心封包結構 Modbus-RTU 沒有差很多,只是是經由 Ethernet 媒介的網路架構,這使使得 Modbus-TCP 在許多方面都比 Modbus-RTU 來的強大,不論是速度、裝置數量限制,拓樸等。
Ethernet 通過交換機可形成 Star topology,得益於 Ethernet 架構,可以設計為 Ethernet client / server 形式,能有多個 clients 端,亦能同時對多個 Slaves 發起請求。
Modbus-RTU 與 Modbus-TCP 重點比較
Modbus-RTU 模式
- 採用 Master/Slave 架構,由 Master 發起 request 並等待 slave response,常見的實作是 blocking 的方式,若有多個裝置,那就是由 Master 一一去 polling 多個 Slaves 裝置。而實作成非阻塞(non-blocking)或非同步(asynchronous) 的 Modbus RTU 是完全可行的,並且在某些情況下更高效。
- 通信延遲取決於波特率、串行接口速度,以及訊息間的 3.5 字元時間間隔。且單次通信通常只能處理一個主從請求,當設備數量增加或通信頻繁時,效率下降明顯。
- 適用於短距離、低成本的串行通信環境。搭配 RS-485 可支援多節點通信,適合小型分布式系統。
Modbus-TCP 模式
- Client 可以一次對多個 Servers 發出 request,是較快速的資料交換方式,但 Servers 的 response 順序不一定照著 request 的順序,這是網路的特性。
- 因為採用 Ethernet,因此可以輕鬆與許多其他 Ethernet 裝置或者透過 Ethernet Gateway 與其他總線協議共享同一網路,擴充性更好。
- Modbus-TCP 是將 Modbus-RTU 的 PDU(Protocol Data Unit)封裝為 TCP 的應用層數據; Slave ID 則改用 ip address; 且捨棄原本的 CRC 校驗欄位,採用 TCP/IP 協議的校驗機制。
- 基於高速以太網,通信延遲較低,可同時處理多個 TCP 連線,支援更高數量的設備,實現並行通信,不會因為單線阻塞而影響整體效率。
- 常用於現代化的工業控制系統,支持雲端和遠程監控,可直接集成於 IT 網絡,與其他基於 TCP/IP 的系統無縫通信。
- 設備需要以太網接口,硬體成本較高,且實現相對複雜,需要 TCP/IP 協議棧支持,需要配置 IP 地址、子網掩碼和網關等網絡參數。
| 特性 | Modbus RTU | Modbus TCP |
|---|---|---|
| 傳輸媒介 | RS-232 / RS-485 | Ethernet |
| 傳輸速率 | 低(受波特率限制,例如 9600bps、115200bps) | 高(受網絡速率限制,可達數百 Mbps) |
| 設備數量 | 受限(最多 32 個節點) | 基於 ip,幾乎無限 |
| 通信效率 | 單線串行通信,效率低 | 多連接並行通信,效率高 |
| 設備成本 | 低 | 較高 |
| 配置難度 | 簡單 | 複雜 |
| 適用場景 | 小規模、低成本工業通信 | 大規模、現代化網絡通信 |
| 架構 | 需要明確的主從關係(Master/Slave) | Client/Server 架構,可同時與多個設備通信 |
根據應用需求選擇:
- 如果系統規模小,且需要低成本的穩定通信,Modbus RTU 是理想選擇。
- 如果需要高速、大規模、靈活的通信環境,特別是需要與 IT 系統集成,選擇 Modbus TCP 更為合適。
RS-485 簡介
- 由 RS-485(A) / RS-485(B) 2 線組成的雙絞線,傳遞差分訊號
- 常用硬體是 MAX485 晶片,可將 UART TX/RX 信號轉為 differtial 差分信號。
- 接收端判斷 2 線 A-B 的結果即可判斷數位訊號為 High(又稱 Mark) 或者 Low(又稱 Space)。
- 為半雙工模式(Half-Duplex),同一條總線上在任一時刻只有一個設備作為驅動器,其餘設備均作為接收器:
- 主站請求時,主站是驅動器,從站是接收器。
- 從站回應時,某一個從站成為驅動器,主站和其他從站是接收器。
- RS-485 設計為 Multi-Drop 多設備共用總線的 Bus topology。
- 其需要 2 個終端電阻施加在 Bus 兩側末端,跨接在 A 與 B 線上避免 signal reflection,這是 Bus topology 常見作法。
- 限制: 標準的 RS-485 BUS 上的裝置數量上限為 32 台。
優點:
- 因為是雙絞線差分信號,所以抗干擾性強,可以傳輸距離更遠。但須注意 cable length 跟 baudrate 以及裝置數量是相互影響的。
- 比起 RS-232 point-to-point topology,RS-485 的 Multi-drop 架構可以多裝置連接共用總線。
- 接線簡單,就 2 條線即可,不需要共地,因為是差分訊號,接收端只需要比較兩線的電壓差異,即可判斷訊號,傳送端跟接收端的電壓基準是不是相同並不重要。 (然而,若訊號出現問題還是可以試著共地試試。)
- 對於程式開發者來說非常方便,就是直接控制 UART 晶片而已,所以也需要配置 UART 設定,比如 baudrate。
Modbus-RTU 協議
這邊不會詳細列出 request 跟 response 格式,因為 Modbus 協議很簡單,Modbus Specification 也舉例的蠻清楚,只要找裝置實際操作,對照 spec 看基本很容易就可以理解。 因此這邊主要提供一些 Diagram,透過圖片勾勒出基本概念。 本文章主要討論的對象是 Modbus-RTU,為了撰寫方便,若有未表示協議類型的 Modubs 簡稱,請默認其為 Modbus-RTU。
Modbus Frame
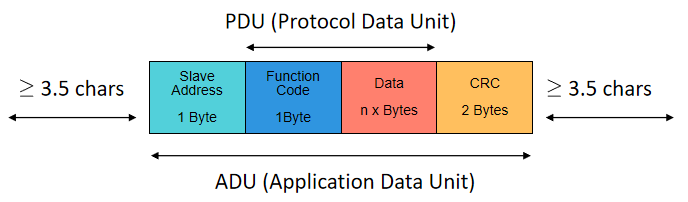
Modbus 封包共分 4 大部分:
- Slave Address (固定 1 byte)
- Function Code (固定 1 byte)
- Data (n Bytes),Data field 依照不同 function code 會有不同的長度
- CRC (固定 2 bytes)
重點提要
- Modbus 整個封包上限為 256 bytes,扣掉其他固定大小的部分,Data 部分的變動範圍就是 0 ~ 252 Bytes。
- 封包一定是 Bytes 倍數,不會有零星的 bits,就算只操作 1-bit 的 coil,也會以 0 補滿傳遞 1 個 Byte。
- Modbus-RTU 為 Master/Slave 架構,只能有一個 Master,故 Master 無須地址,但每個 Slaves 有唯一地址。Slave Address 由 1 byte 表示,其中
1-247可使用,其餘保留給特殊用途。 - Function Code 用來表示 Master 要 Slave 做什麼,針對 Slave Register Map 哪個類型部分; 讀 或 寫 ; single 或 multiple 操作。
- Data 資料則是依據 Function Code 以及 request/response 需要,而有不同內容。
- Modbus 採 CRC-16,而 CRC-16 有很多種,Modbus CRC 採用其中一種,有許多網路工具提供 CRC 計算,此工具經過測試沒問題。
- CRC 是由前三個部分的數據計算而得的,照著 Slave Address, Function Code, n Bytes of Data 的順序輸入計算工具即可。
- CRC-16 的 Low-Byte 先傳, High-Byte 後傳。(See page 113 of Modbus Specification)
傳送順序
- 任意 Byte 中,必定是 Least Significant Bit 先傳,最後是 Most Significant Bit,即照 UART Protocol 順序。
- 至於 Data Field 超過 1 Byte 以上的資料,就照 [Modbus Specification] 規範,每個 function code 的 request / response 都有清楚規範 Data Bytes 傳送順序。
- CRC-16 的 2 Bytes 資料,規範是 Low-Byte 先傳, High-Byte 後傳。
Function Code
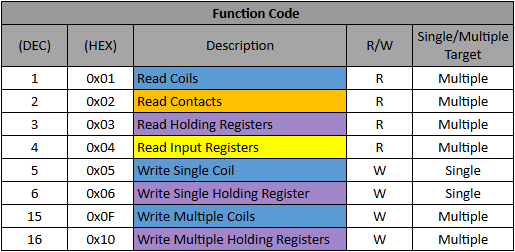
Function Code 用來表示 Master 要 request Slave 做什麼,
- 針對 Slave Register Map 哪個類型部分
- 讀 or 寫
- 是 single or multiple 操作。
Modbus Slave Register Map
Slave Register Map 分為 4 個部分:
- Discrete Output = Coil (1-bit)
- Discrete Input = Contact (1-bit)
- Input Register = Analog Input (16-bits, 2 words)
- Holding Register = Analog Output (16-bits, 2 words)
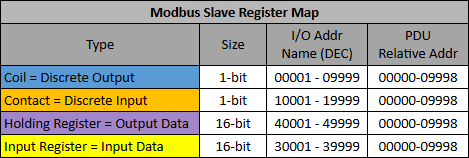
Slave 設計 Register Map,告知 Master 自己數據資料格式。Master 透過 function code 即可指定對 Slave Register Map 哪一部分的資料進行讀或寫。由上圖可看到 I/O Address Name 前綴第一個數字即代表 Slave Register Map 類型,比如說 4xxxx 代表 Holding Registers。
而封包 PDU 之中指定的 address,是相對於 function code 指定操作對象(Slave Register Map 4 個部分之一)的相對位址。比如 function code 為 6; PDU Address 給 2 的話,那就是針對 Holding Register 區域 offset 2 的位置,即操作 Register Map 40003 (40001 + 2) 這個 Holding Register。
Modbus 本質是資料交換 protocol,不過從 Modbus Slave Register Map 4 個部分之命名方式,隱含其與 PLC I/O 的連結,如 coil, contact, analog in, analog out 等等。 源於歷史,當初設計這個 protocol 就是把 Slave 設計為擴充 Master 之 I/O 而生,Master 操作 Slave 猶如操作自己的 Coils 或 Contacts。
但既然 Modbus 本質是資料交換,那 Slave 端 Register Map 自然不限於跟 Coils 與 Contacts 交互,資料交換後得以進行任意運算或其他 I/O 操作。
- Master request
Coils或Holding Registers部分,資料流就是 : Master -> Slave。 - Master request
Discrete Inputs或Input Registers部分,資料流就是 : Slave -> Master。
Modbus RTU 之傳輸時間間隔
封包與封包之間要有 3.5 chars 的傳輸間隔
Modbus RTU 協議規定相鄰的 Modbus frame 之間,必須有 「3.5 字元的傳輸時間之空閒間隔」來分隔封包:
- 主站發送請求後,總線必須空閒至少 3.5 字元時間,從站才能開始回應。
- 從站回應完成後,總線也需要維持 3.5 字元的空閒時間,主站 下一次請求才能發送。
在該時間區間內,master 與 slave 不做任何動作。 如果空閒間隔小於 3.5 字元時間,可能導致設備認為兩個 Modbus frame 是連續的一部分,從而發生解析錯誤。
3.5 字元時間如何計算?
以 UART 9600N81(8 個數據位元,無校驗位元,1 個停止位元)為例:
每個字元需要的時間:
(1 起始位 + 8 數據位 + 1 停止位) / baudrate
= (1 + 8 + 1) / 9600 秒
= 1.0417 毫秒/字元
3.5 字元的傳輸時間:
= 3.5 × 1.0417 毫秒
≈ 3.646 毫秒
字符傳送速度跟 UART baudrate 有關,跟封包大小無關。
Modbus RTU 的規定 Modbus frame 是連續發送的,中間不應有超過 1.5 字元的空閒時間
Modbus RTU 要求 Modbus frame 內的所有字節必須無間斷發送。 若 Modbus frame 中間有超過 1.5 字元的空閒時間,接收端會認為該 frame 已經結束,並將剩餘部分當作下一個 Modbus frame 的開頭。
Example
實驗步驟
-
在 Modbus RTU Slave 內部實作了 2 個 coils。
-
先以 Function Code
0x0FWrite Multiple Coils,將第 1 個 Coil 寫 ‘0’,第 2 個 Coil 寫 ‘1’。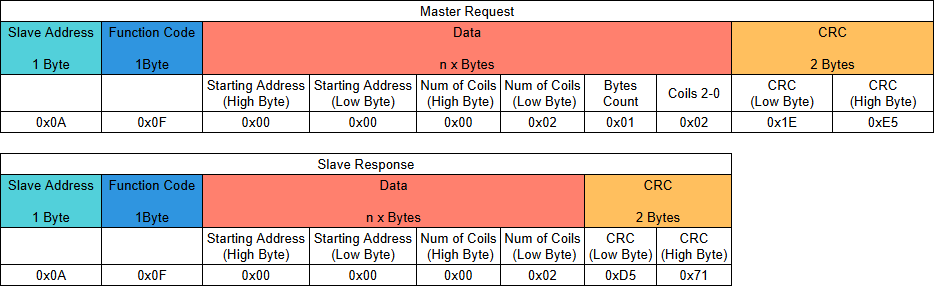
-
再以 Function Code
0x01Read Coils 讀取,將得到 Coils 讀值為 0x02。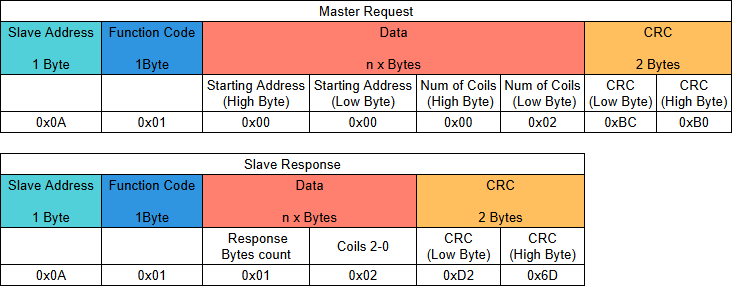
幾點觀察:
- 在指定 PDU Data Address 以及 quantity 時,都是 High-byte 先傳再來才是 Low-byte。
- quantity 單位是看傳什麼資料,若操作對象是 coil,那 quantity 代表多少 coils; 若操作對象是 holding register,那 quantity 則代表多少 holding registers。
- 傳送 Data Value 時,若超過 1 byte,則是先傳 Data Address 指向的那筆資料,以 little-endian 的記憶體存放來說,那就是先傳 Low-Byte 的資料。
- CRC 則是 Low-byte 先傳再來才是 High-byte。
至於每個 Byte 都是從 LSB 開始傳,最後才是 MSB,以上規範在規格書中都寫得很清楚。
不過一般使用者不需要了解那麼深入,只需要知道要放什麼資料即可,通常給使用者輸入的介面都是很友善的。
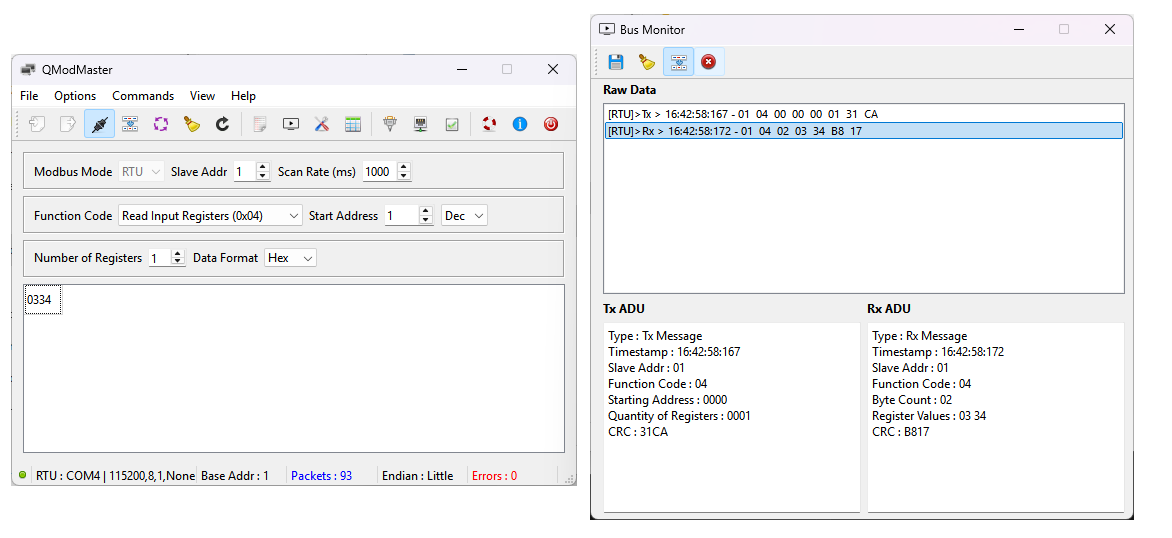
實測
測試目的與方法
為了要驗證對於 protocol 了解的是否正確,一定要實測看看,所以找了現成的 Modbus-RTU Master 與 Slave 來測試。為了方便測試,Master 找了跑在 PC 上的 UI 程式,方便操作; 而 Slave 則找 Arduino 程式,畢竟手邊有許多 Arduino 裝置,若想測試多台 slaves 的 bus topology 會比較方便。
在 Windows PC 用 QModMaster 作為 Master 測試 Arduino Modbus RTU Slave 功能,測試 QModMaster 支援之 Function code: 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x0f, 0x10。對照 Modbus Specification 手冊查看通訊格式,實測 Modbus-RTU Master 與 Slave 運作是否正確。
測試環境
- 因為手邊沒有 USBto485 裝置,所以僅使用 USB2UART 裝置,但我想對於測試 Modbus-RTU 效果是一樣的,只可惜無法像 RS-485 一樣測試多裝置。
- PC Modbus Master 軟體 - QModMaster
- 簡單好用,支援 Modbus-RTU 與 Modbus-TCP,目前僅測試過 Modbus-RTU 部分。
- 基於 Qt-based UI 及 libmodbus Modbus Library。
- Arduino Modbus Slave 韌體 - Arduino Modbus RTU Slave Example
-
作者為: C.M.Bulliuer
-
程式架構簡單,但需要好幾個 libraries 才能運作,compile 不過只要依照缺少 library 之提示,透過 library manager 一一下載即可。下圖為需要之相依程式庫:
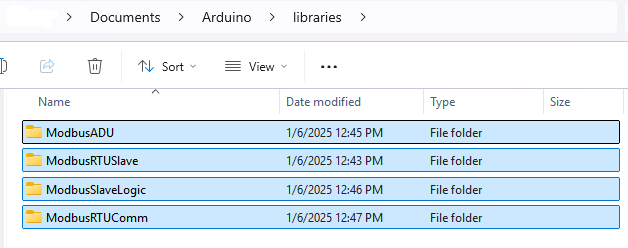
-
Code
原始範例程式透過巨集定義是可以運行在多個平台的,只是為了呈現簡便,我只保留與我測試平台相關的部分。
#include <ModbusRTUSlave.h>
#if defined(__AVR_ATmega328P__) || defined(__AVR_ATmega168__) || defined(__AVR_ATmega2560__) || defined(__AVR_ATmega1280__)
#define MODBUS_SERIAL Serial
#else
#define MODBUS_SERIAL Serial1
#define MODBUS_BAUD 115200
#define MODBUS_CONFIG SERIAL_8N1
#define MODBUS_UNIT_ID 10
const int16_t buttonPins[2] = {2, 3};
const int16_t ledPins[4] = {5, 6, 7, 8};
const int16_t dePin = 13;
const int16_t knobPins[2] = {A0, A1};
ModbusRTUSlave modbus(MODBUS_SERIAL, dePin);
const uint8_t numCoils = 2;
const uint8_t numDiscreteInputs = 2;
const uint8_t numHoldingRegisters = 2;
const uint8_t numInputRegisters = 2;
bool coils[numCoils];
bool discreteInputs[numDiscreteInputs];
uint16_t holdingRegisters[numHoldingRegisters];
uint16_t inputRegisters[numInputRegisters];
void setup() {
pinMode(knobPins[0], INPUT);
pinMode(knobPins[1], INPUT);
pinMode(buttonPins[0], INPUT_PULLUP);
pinMode(buttonPins[1], INPUT_PULLUP);
pinMode(ledPins[0], OUTPUT);
pinMode(ledPins[1], OUTPUT);
pinMode(ledPins[2], OUTPUT);
pinMode(ledPins[3], OUTPUT);
modbus.configureCoils(coils, numCoils);
modbus.configureDiscreteInputs(discreteInputs, numDiscreteInputs);
modbus.configureHoldingRegisters(holdingRegisters, numHoldingRegisters);
modbus.configureInputRegisters(inputRegisters, numInputRegisters);
MODBUS_SERIAL.begin(MODBUS_BAUD, MODBUS_CONFIG);
modbus.begin(MODBUS_UNIT_ID, MODBUS_BAUD, MODBUS_CONFIG);
}
void loop() {
inputRegisters[0] = analogRead(knobPins[0]);
inputRegisters[1] = analogRead(knobPins[1]);
discreteInputs[0] = !digitalRead(buttonPins[0]);
discreteInputs[1] = !digitalRead(buttonPins[1]);
modbus.poll();
analogWrite(ledPins[0], holdingRegisters[0]);
analogWrite(ledPins[1], holdingRegisters[1]);
digitalWrite(ledPins[2], coils[0]);
digitalWrite(ledPins[3], coils[1]);
}
Architecture
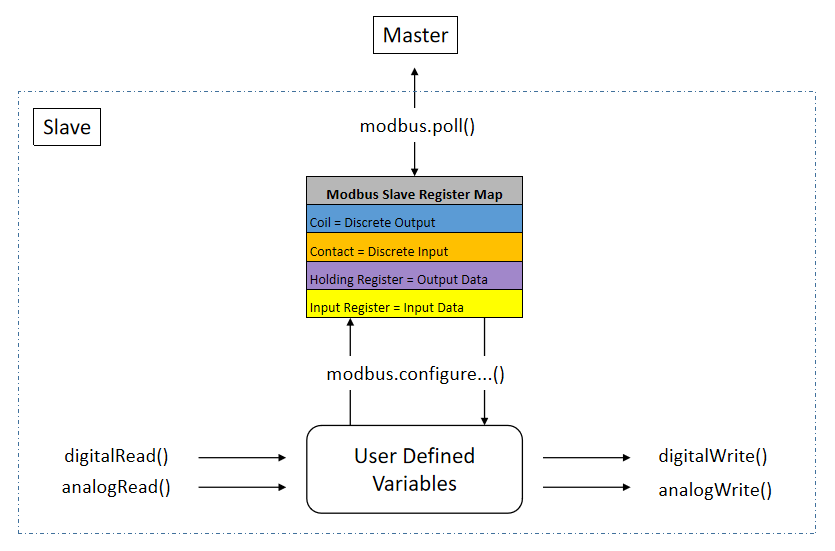
User 為 Slave Register Map 的 4 個部分分別定義 Array 空間,並透過 configure...() 函式與 Register Map 綁定。
Configure 完畢後,使用者只須要操作自己定義的變數空間(user defined variables),無須去操作 Slave Register Map。
Slave 由 Modbus.poll() 函式,將 Slave Register Map 資料透過 Modbus 交換。
configure...() 等相關 configure API 只能設定一次,無法分次設置,所以必須一次給好完整空間。
這點比較可惜,因為我總想為 IO 設定有意義一點的名稱,比如 LED, fan 等等名稱,不想統統用 coils[] array 表示。
結果
經過測試兩者運作無誤,透過 Modbus Protocol,Master 可以 request 控制 Slave 不管是數位或類比之輸入輸出。 QModMaster 以及 Arduino Slave Example 都很簡單也成功通過測試,可以作為 Modbus 學習參考工具。 若未來要自己實現自己的 Modbus-RTU Master 或者 Slave 裝置,都可以用這些工具交叉驗證。
延伸討論
為何 Modbus 使用 RS-485 僅支持 32 個設備?
先說結論: 這是 RS-485 的物理層特性 的限制,而非 Modbus。
RS-485 的設備數量限制與其驅動能力有關:
每個設備(包括主站和從站)會對通信總線施加一定的負載,通常以 “單位負載(Unit Loads,UL)” 表示。 RS-485 總線上的每個裝置都是一個負載,RS-485 標準規範規定,驅動器必須能驅動 32 單位負載 。 每個負載會對總線施加一定的電氣負載,這些負載的累積不能超過驅動器的能力。意思是: 其中 1 台裝置作為驅動器 (Driver/Transceiver)發送訊號時,需要推動至少 31 台接收器 (Receiver)。
- Driver(驅動器):負責在 RS-485 總線上發送信號的設備,通常是主站或從站在某一時刻充當的角色。
- Receiver(接收器):負責接收來自總線上的信號的設備,驅動器之外的都是接收器。
擴充方法:
- 現代 RS-485 晶片可能是低負載(Low-Load)設計(例如 1/4 UL 或 1/8 UL),這允許更多的設備接入,可以將設備數量增加到 128 或更多。
- 如果接收器的負載是 1/4 UL,每個驅動器可以支持多達 128 個接收器(32 UL ÷ 1/4 UL = 128)。
- 如果接收器的負載是 1/8 UL,每個驅動器可以支持多達 256 個接收器。
- 或使用 中繼器(Repeater) 可以增加總線上的設備數量,同時擴展通信距離。
- 中繼器將 RS-485 網絡分段,增強信號並重新驅動。
- 每段網絡的設備數量仍受 1 驅動器 + 31 接收器的限制,但中繼器可以增加網絡的總設備數量。
Modbus 協議層的限制
Modbus 協議層限制了 ID 的範圍,Modbus 的從站地址(Slave ID)為 1 Byte,其中 0、248-255 保留作其他用途(如廣播地址和未來擴展),其實際 Slaves 地址範圍為 1-247。
5. 總結
Modbus 搭配 RS-485 時只能有 32 個設備是受制於 RS-485 物理層的能力。
- “1 驅動器 + 31 接收器” 是 RS-485 在標準單位負載情況下的最大設備配置。
- 使用低負載接收器或中繼器可以增加網絡容量。
- 在實際應用中,信號完整性(如終端電阻和線路長度)也是限制 RS-485 設備數量的重要因素。
Modbus ASCII 和 Modbus RTU 比較
這是 Modbus 協議的兩種傳輸模式,它們的主要區別在於數據編碼、傳輸速度以及處理方式。以下是它們的比較:
-
數據編碼:
- Modbus ASCII:數據是以 ASCII 字符格式傳送,每個字節都會轉換為兩個 ASCII 字符來表示。例如,字節
0x0A會被傳送為兩個字符0、A(十六進制)。 - Modbus RTU:數據以二進制格式傳送,每個字節直接傳送 8 位數據。因此,Modbus RTU 在數據編碼上比 Modbus ASCII 更為高效,因為它不需要額外的字符轉換。
- Modbus ASCII:數據是以 ASCII 字符格式傳送,每個字節都會轉換為兩個 ASCII 字符來表示。例如,字節
-
傳輸效率:
- Modbus ASCII:由於每個字節需要被轉換成兩個 ASCII 字符,因此其傳輸效率較低,數據量更大,傳輸速度相對較慢。
- Modbus RTU:由於使用的是二進制格式,數據量較少,傳輸速度較快,因此比 Modbus ASCII 更有效率。
-
同步機制:
- Modbus ASCII:每個消息的結尾通常會有一個字符
CR(回車)和LF(換行)來標誌結束,這樣可以幫助接收方識別消息結尾。 - Modbus RTU:消息的結尾是由固定的時間延遲來確定,通常是無線消息之間有至少 3.5 個字符時間的間隔來標識一個消息的結束。
- Modbus ASCII:每個消息的結尾通常會有一個字符
-
錯誤檢測:
- Modbus ASCII:使用 16 位的 LRC (Longitudinal Redundancy Check) 校驗來檢查數據是否完整。
- Modbus RTU:使用 CRC (Cyclic Redundancy Check) 校驗,它比 LRC 更強大,更適合長距離的數據傳輸。
總結來說,Modbus RTU 在大多數情況下都比 Modbus ASCII 更為高效,基本上現在很少在用 ASCII 模式,因此可以專注在 RTU 模式即可。